2025 Working Progress
By 2025/12/17
- 调研完毕
RoboBrain2.0,详细记录见飞书文档。部分结论如下: - RoboBrain2.0模型支持的 输入模态 包括 (文本类) 指令文本/scene graph+ (视觉类) 图像/多视角图像/视频;输出模态为 纯文本 ,可能是用文字描述的子任务分解结果,也可能是一串图片上的像素点;
- RoboBrain2.0模型的 典型任务 包括:
- 可供性预测(affordance prediction),预测图像中物体的可交互区域,输入模板"Please identify the affordance area xx",输出图像上的bounding box坐标;
- 空间指代(spatial referring),定位图像中的物体,输入模板 "Please point out xxx",输出图像上的像素坐标;
- 轨迹预测(trajectory forecasting),预测终端执行器的运动轨迹,输入模板"Please predict the key trajectory points for xxx",输出一系列图像中的坐标点,这些坐标点连成了预测的终端执行器的运动轨迹;
- 多智能体协作(multi-agent coordination)、场景图建构与更新(scene graph construction and updating)等;
- 上述典型任务中,运动轨迹在图像中的定位如何与空间坐标匹配,执行器如何按照轨迹运动到指定位置,不在VLM的能力范畴内。
- RoboBrain2.0的VLM基线为
qwen2.5-VL-7B/32B,其参考推理脚本也复用了qwen的pipeline。Robobrain2.0官方似乎默认用户会同时输入文本和图像,没提供输入仅含文本的推理示例;手动修改后的text-only推理会遇到中间张量不在同一设备上的推理错误,需要指定在单卡运行; - RoboBrain2.0对工具调用(tool calling)存在不足。原生
qwen2.5-VL-7B/32B未在相关数据集上训练,其官方chat template(对话模板)中没有包含工具调用的相关内容。RoboBrain2.0在训练时也未对这一部分进行补充,且沿用qwen的pipeline,为后续搭建MCP-Client造成一定困难(详细见下)。 对话模板:将用户的输入和上下文、可利用的工具按照一定格式填充形成prompt,例如,填充后生成的prompt"你是一个有用的助手(system message),用户输入的文本是xx,你可以调用xx工具,xx工具的输入参数为xx",示例。qwen3-VL在训练时包含了工具调用数据,且对应的对话模板中也有工具调用相关内容;- 尽管在训练时未对工具调用特化训练,考虑到LLM/VLM具有一定的泛化能力,可以通过prompt以纯文本的形式描述工具与工具调用方式,可参考RoboOS的prompt模板,但是调用性能或许显著低于专项训练后的模型。
- 阅读文档+运行参考示例,了解
MCP(Model Context Protocol): - MCP的作用是 联通AI应用(如Claude Desktop,AI-enhanced IDE等)和数据与工具,作用是将AI应用(N)和数据与工具(M)之间开发的成本/复杂度从"N*M"(每个AI应用需要对每个数据/工具一一适配)降低到"N+M"(对每个AI应用、数据、工具适配一次,对接到MCP中),作用可以类比模型部署中的onnx;
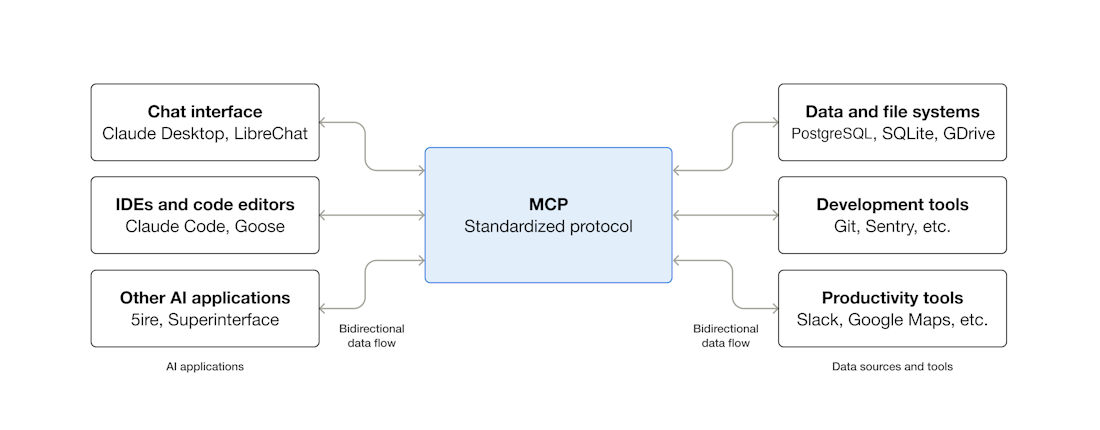
- MCP是"Server-Client"架构,基本组件包括Host、Server和Client:
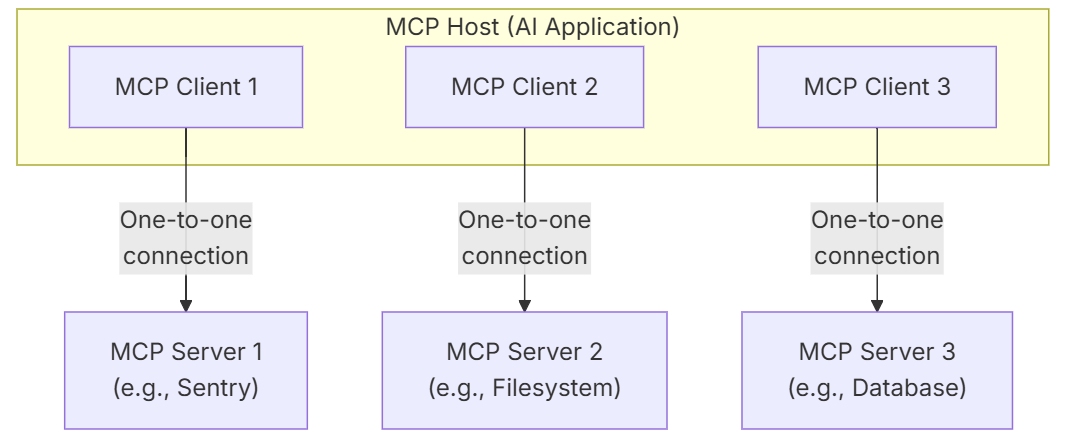
- Host就是各个AI应用,如Claude Desktop,核心是其中的LLM;
- Client是LLM侧与工具对接的接口,它负责LLM与应用的通信,并提供征询(Elicitation)用户输入、限定文件操作范围(Root)的功能;
- Server是按照MCP包装起来,暴露特定功能的数据库/工具;
- MCP工作的基本流程是,Client从各个Server收集可用的工具/数据(通过
list_tools方法),维护一个可用工具的列表;当用户输入query后,将用户query与工具列表填充到一个template中,形成包含用户需求与可用工具描述的prompt,输入给Host(LLM),LLM将返回一段可能包含工具调用(用特殊符号/约定字符标识)的输出;Client将LLM输出文本中的调用信息(工具名、工具参数)提取出来,并与相应的Server通信,获得一段Json格式的工具响应;工具响应与之前的会话信息(用户query、LLM的第一次回答)组合在一起,作为LLM第二轮的输入,LLM将根据用户需求、自己的调用历史、工具响应进行第二轮推理,并把结果返回给用户; - MCP的社区生态比较丰富,官方给出了参考Client列表与现成的server,其中就有宣称可以为本地LLM包装client的工具,如mcp-use(未细看)。
- 尝试依托本地大模型(RoboBrain2.0-7B)搭建MCP Client,但是进展不太顺利:
- 目的是,延续使用
ros-mcp-server将LLM接入ROS环境(乃至仿真场景)进行机器人控制的思路,ros-mcp-server官方repo中使用的MCP Client是Claude Desktop(严格来说,对应于MCP中的Host,它做了若干client的集成,但是我们只需要跑通其中一个,完成基本流程验证即可),它是一种基于商业闭源LLM API调用的方式,与我们未来的使用场景不匹配(本地部署开源LLM),因此需要将Claude Desktop替换为基于本地LLM的MCP Client。若完成基本流程验证,后续可将RoboBrain2.0替换为任意本地LLM/VLM。 - 参考MCP官方Client搭建流程,将官方示例中的Anthropic API调用改为本地LLM推理,遇到 本地LLM无法调用工具 的问题,这是因为 RoboBrain2.0官方推理pipeline沿用了qwen2.5的,两者都没有考虑LLM的工具调用能力,对应的对话模板中未包括工具调用部分 。目前考虑解决问题的思路如下:
By 2025/12/23
2021-2026, UCaiJun Revision
5907ca5 Kaleido's Personal Page
master