Practical Deep Raw Image Denoising on Mobile Devices
2021/10/27 - 11/15整理
来源:ECCV20
resource:github上备份的包括ipad标注的pdf版本。
作者是Tsinghua University / Tsinghua University的Yuzhi Wang, Haibin Huang, Qin Xu, Jiaming Liu, Yiqun Liu, Jue Wang等人,yuzhi似乎是实验室的远古学长哎。
Summary:一篇理论和实际结合得非常紧密的文章,简直非常可贵(u1s1一般LLCV理论强的都不怎么work吧,麻!)文章从噪声模型出发(虽然是经典的泊松-高斯 -> 异方差高斯的噪声模型,但是给了一个很详细的噪声引入过程,好评),给了一个针对特定sensor的噪声参数(分布中的k和$\sigma$, 这两个值后面会发现和ISO成线性/平方关系)的估计方法(很简洁,用一个linear regression + burst sample就能做到),并提出一个K-Sigma Transformation, 在luminance space将不同ISO下采集的输入和输出同时映射到ISO-independent的空间,从而避免了用过多ISO对应数据训练模型的问题。文章在SID合成数据集上训练,并能很好地泛化到真实手机镜头采集的图片。文章还对U-Net结构进行了修改,让它变得更适合Mobile Device的应用场景。
Key words:
- Noise Model
- Pre/Post-process(如果K-Sigma Transformation也能算在内的话)
Rating: 3.7/5.0 还不错,理论能用到实际上实在太难得了,简直感人。
Comprehension: 4.0/5.0 基本上能懂在干什么事情。
文章的贡献有:
- 给出了估计sensor噪声模型参数的方法,用于生成合成数据训练模型,且能很好地泛化到真实模型上。
- 提出K-Sigma变换,解决ISO对应不同噪声水平的问题。
1 Introduction & 2 Related Work
一些简单的insight / fact:
- 移动设备拍出来的照片更容易被噪声污染,这是因为
- sensor和len的成本更低
- 特别是在低光环境下
- 对于一个特定的sensor模型,其噪声特性是一致且可被充分估计的。
- 当时对于mobile device的去噪方法主要是burst,局限性是
- 需要精确与快速的图像匹配
- 噪声水平高时不能有效去除噪声
3 Method
3.1 The Noise Model
一张比较喜欢的噪声来源分析图:
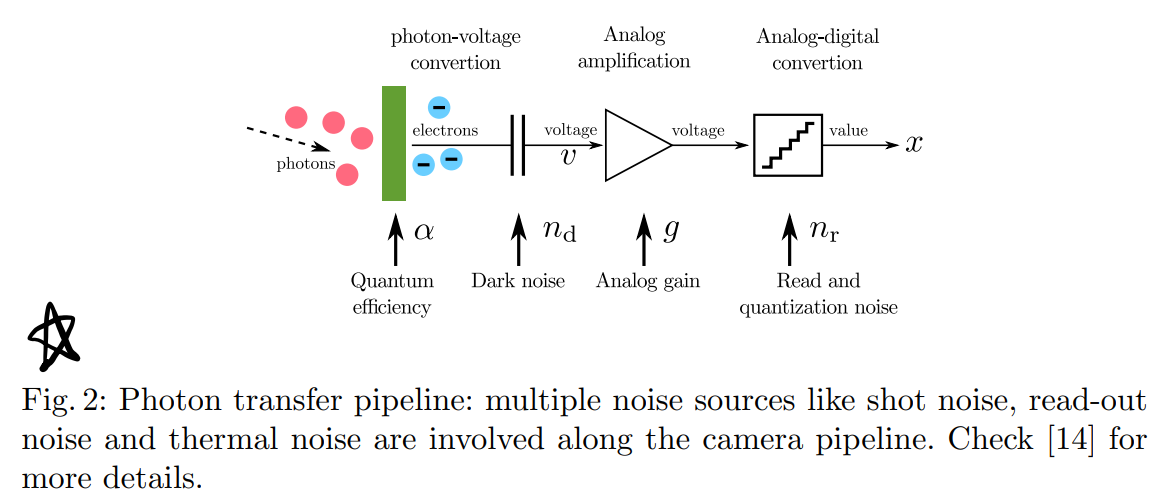
相机传感器将曝光时间内撞击pixel area的光子转换成数字化的luminance map,在没有噪声的情况下,这个过程(linear camera model, at each pixel, a linear amplification)可以建模成:
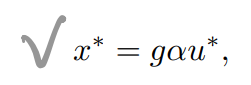
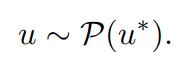
式中\(u^*\)表示撞击像素区域的期望光子数,\alpha是"quantum efficiency factor",g是模拟增益。上图Fig2中的完整过程(含噪声)可以表示成:

其中u是实际的光子计数, 两个n都是高斯噪声,u满足一个关于\(u^*\)的泊松分布:
将1式和3式合在一起有:
做一下变量代换,就有:
式中的k和sigma都和ISO有关。
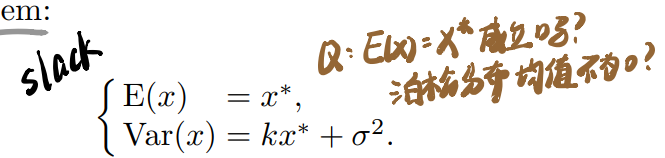
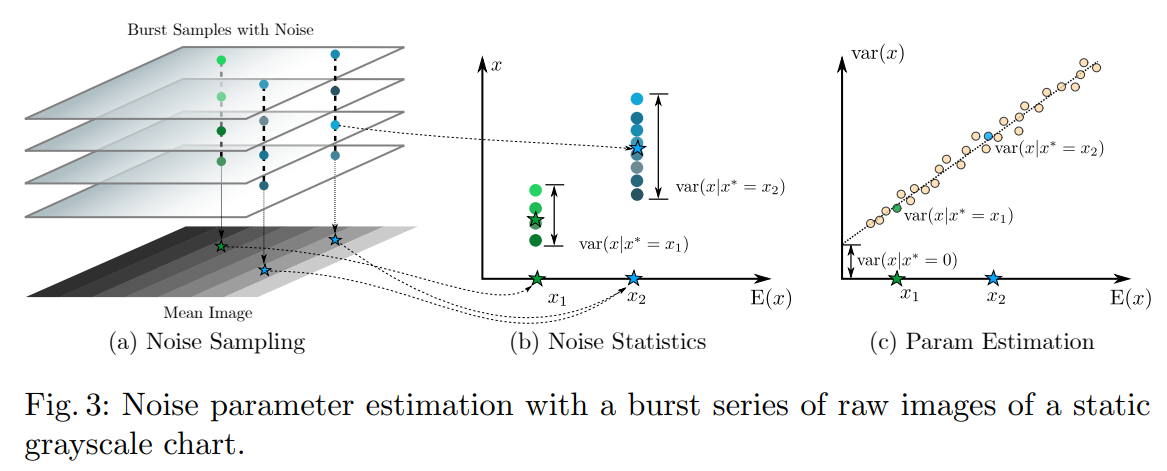
3.2 Parameter Estimation
参数的估计可以用线性回归来做:
具体做法可以用下面这张图来描述:
3.3 The k-Sigma Transform
下面有一个比较精彩的构造,它的目的在于让ISO-dependent的参数k和sigma转换到ISO-independent空间,这样就不必对各种ISO的图像分别训练或者混合训练了,可以视为k与sigma在ISO上的归一化:
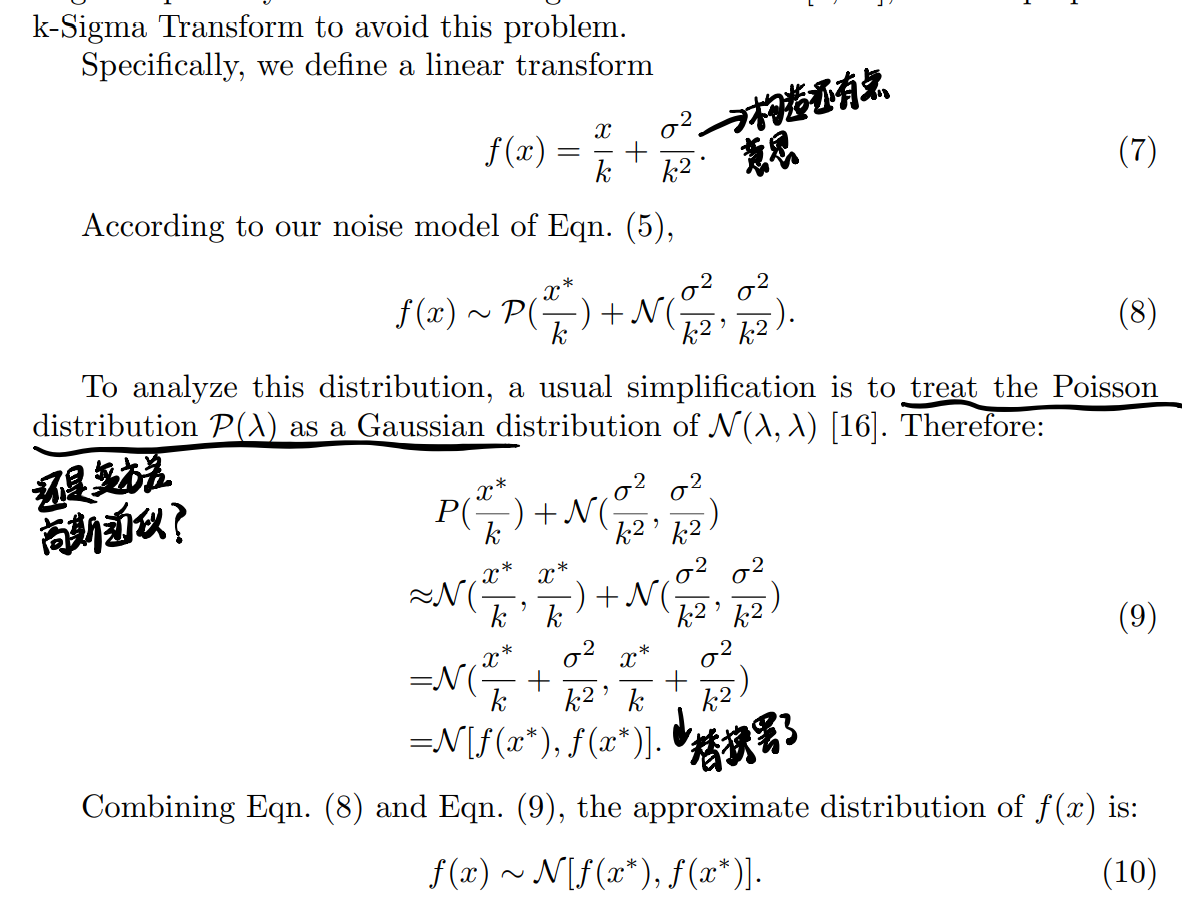
后面的描述我用截图来得更方便些:
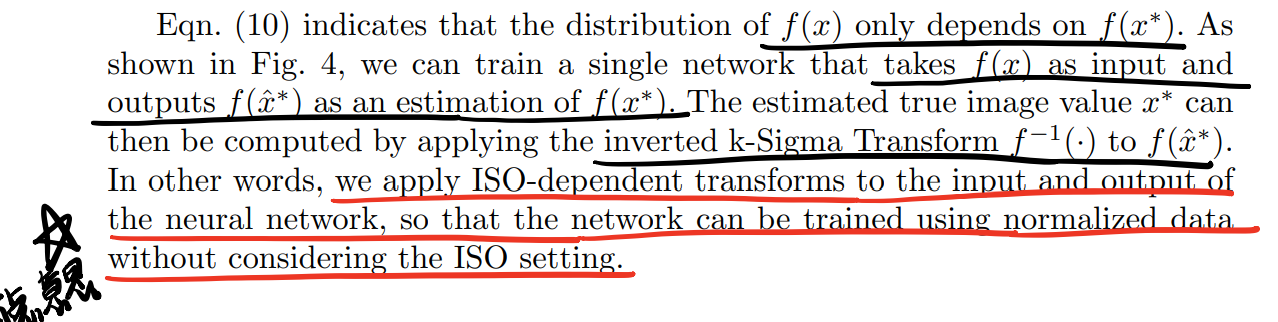
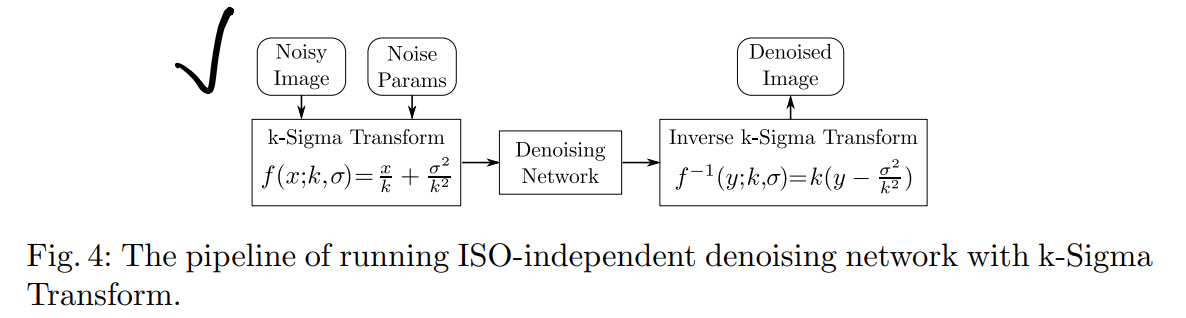
所以网络的处理流程是:
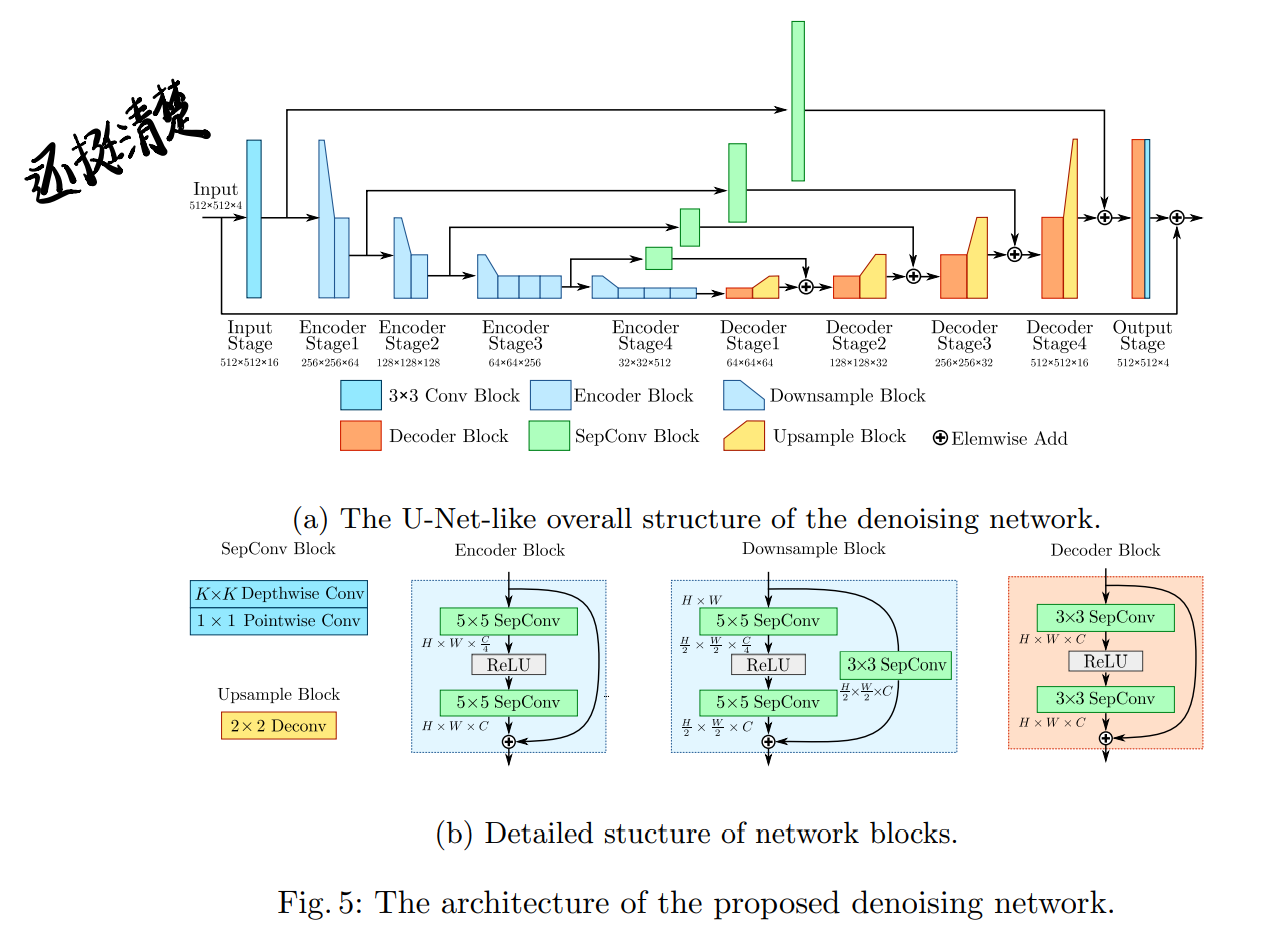
4 Learning to Denoise
网络的backbone基本上是U-Net,但是有许多细节修改,再细些就check原文吧:
4.2 Training Dataset
有点值得大书特书。这里的训练集是从SID从裁了一部分出来(10s / 30s曝光时长),再去掉一些有明显噪声的图片生成的subset,在这些纯净图像上用噪声模型生成噪声加进去。测试的时候则是在自己采集的一个数据集上测,这样就体现出泛化性了。
5 Experiments
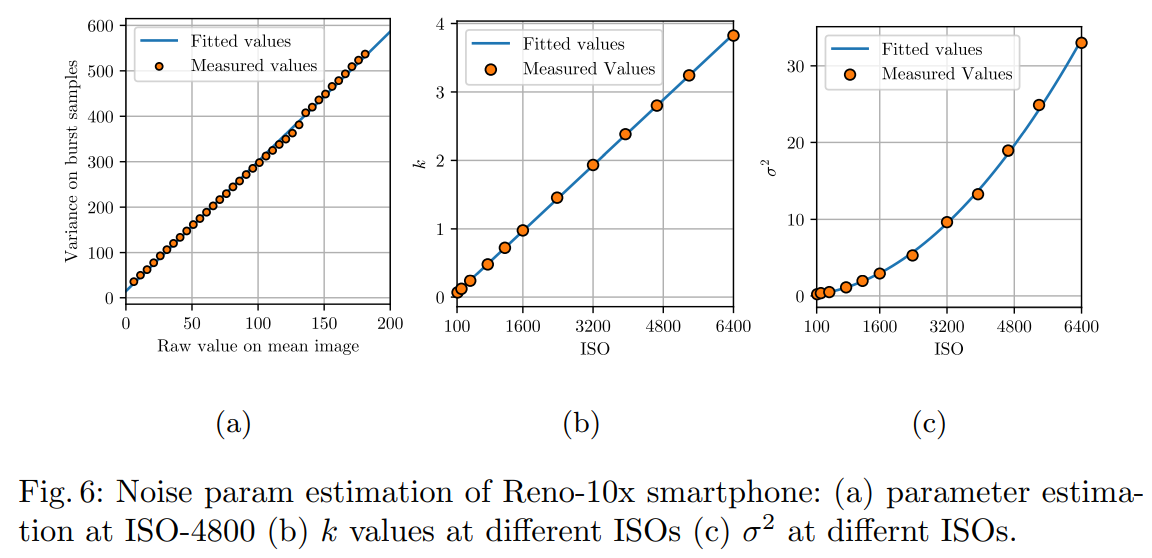
5.1 Noise Parameters Estimation
估出来的噪声参数和实际测出来的非常接近,且和ISO呈一定关系: